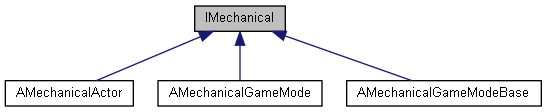
A common interface for all mechanisms.
More...
#include <Mechanical.h>
A common interface for all mechanisms.
◆ IMechanical()
| IMechanical::IMechanical |
( |
| ) |
|
|
inline |
◆ Boot()
| virtual void IMechanical::Boot |
( |
| ) |
|
|
inlinevirtual |
Process newly created subjects.
◆ DoCalcSteadyFrameRatio()
| virtual float IMechanical::DoCalcSteadyFrameRatio |
( |
const float |
Time, |
|
|
const float |
SteadyDeltaTime |
|
) |
| const |
|
inlineprotectedvirtual |
◆ DoCalcSteadyFutureFactor()
| virtual float IMechanical::DoCalcSteadyFutureFactor |
( |
const float |
Time, |
|
|
const float |
SteadyDeltaTime |
|
) |
| const |
|
inlineprotectedvirtual |
◆ DoGetProcessedSteadyTime()
| float IMechanical::DoGetProcessedSteadyTime |
( |
float |
SteadyDeltaTime | ) |
const |
|
inlineprotected |
◆ DoTick()
| void IMechanical::DoTick |
( |
float |
NewTime, |
|
|
float |
DeltaTime, |
|
|
float |
SteadyDeltaTime |
|
) |
| |
|
inlineprotectedvirtual |
Perform a standard ticking routine.
The function can be used in the descendants to perform a standard ticking routine.
◆ InputTick()
| virtual void IMechanical::InputTick |
( |
| ) |
|
|
inlinevirtual |
Process a pre-steady input tick.
◆ PresentationTick()
| virtual void IMechanical::PresentationTick |
( |
float |
DeltaSeconds, |
|
|
float |
FrameRatio, |
|
|
float |
FutureFactor |
|
) |
| |
|
inlinevirtual |
Process a past-steady presentation tick.
- Parameters
-
| DeltaSeconds | The fixed delta time in seconds. |
| FrameRatio | The steady frame ratio. |
| FutureFactor | The steady future factor. |
◆ ReceiveBoot()
| void IMechanical::ReceiveBoot |
( |
| ) |
|
Process newly created subjects.
◆ ReceiveInputTick()
| void IMechanical::ReceiveInputTick |
( |
| ) |
|
Process a pre-steady input tick.
◆ ReceivePresentationTick()
| void IMechanical::ReceivePresentationTick |
( |
float |
DeltaSeconds, |
|
|
float |
FrameRatio, |
|
|
float |
FutureFactor |
|
) |
| |
Process a past-steady presentation tick.
- Parameters
-
| DeltaSeconds | The fixed delta time in seconds. |
| FrameRatio | The steady frame ratio. |
| FutureFactor | The steady future factor. |
◆ ReceiveSteadyTick()
| void IMechanical::ReceiveSteadyTick |
( |
float |
DeltaSeconds | ) |
|
Process a fixed-rate steady tick.
◆ SteadyTick()
| virtual void IMechanical::SteadyTick |
( |
float |
DeltaTime | ) |
|
|
inlinevirtual |
Process a fixed-rate steady tick.
◆ UMachine
◆ bInsidePresentationTick
| uint32 IMechanical::bInsidePresentationTick |
|
protected |
Is this mechanism currently in the process of presentation ticking?
◆ bInsideSteadyTick
| uint32 IMechanical::bInsideSteadyTick |
|
protected |
Is this mechanism currently in the process of steady ticking?
◆ bInsideTick
| uint32 IMechanical::bInsideTick |
|
protected |
Is this mechanism currently updating?
◆ PrevTime
| float IMechanical::PrevTime = NAN |
|
protected |
The game time of the previous tick.
◆ ProcessedSteadyFrame
| int32 IMechanical::ProcessedSteadyFrame = -1 |
|
protected |
The last, actually processed steady frame.
-1 if the steady tick was not run yet.
◆ SteadyFrame
| int32 IMechanical::SteadyFrame = 0 |
|
protected |
The steady frame we are currently part of.
The documentation for this class was generated from the following file:
- D:/ApparatusMark/Plugins/Apparatus/Source/ApparatusRuntime/Public/Mechanical.h